< Return to Engineering Projects
This project was created from February 2020 to May 2020.
Project partners were Juhee Goyal, Jeff Short, Maxwell Brown, and Joseph Bilski.
What is Turfwars?
Created for ES 51, Harvard School of Engineering and Applied Science’s Intro to Computer Aided Machine Design, Turfwars is the tournament held at the end of the semester to test the final projects created in the class. You are required to design and manufacture a robot that will be able to compete in this tournament. Unfortunately my class was held in the spring of 2020, so our designs had to remain on the page.
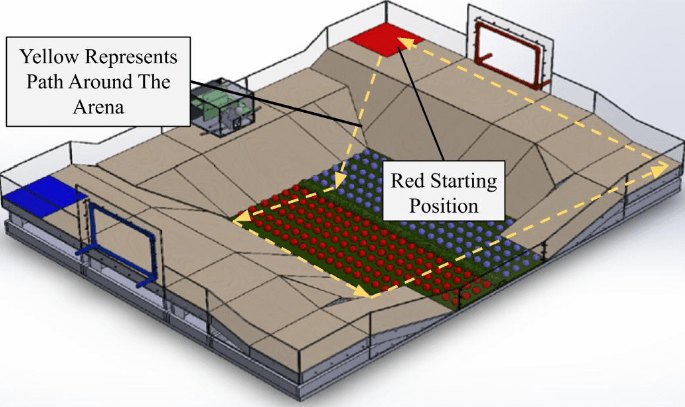
This was the Turfwars arena. The blue and red balls at the bottom are ping pong balls, and the blue and red squares at the corner of the arena are the starting positions of the robots. Every robot had to fit in a cubic foot.
The way to win a game was to get the most of your own color ping pong balls inside your own goal – you can see a red and blue goal in the arena. There were other game rules, such as stealing the other team’s ping pong balls would subtract a fraction of a point for each ball.
You can also see that the arena has ground of varying slope. Some robots, if designed top heavy or too close to the ground, could only travel over the shallowly sloped ground.
Development
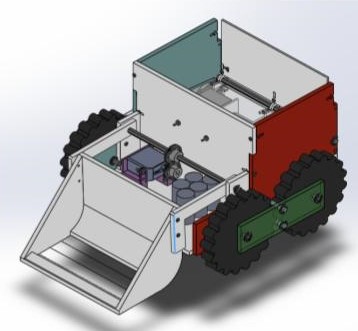
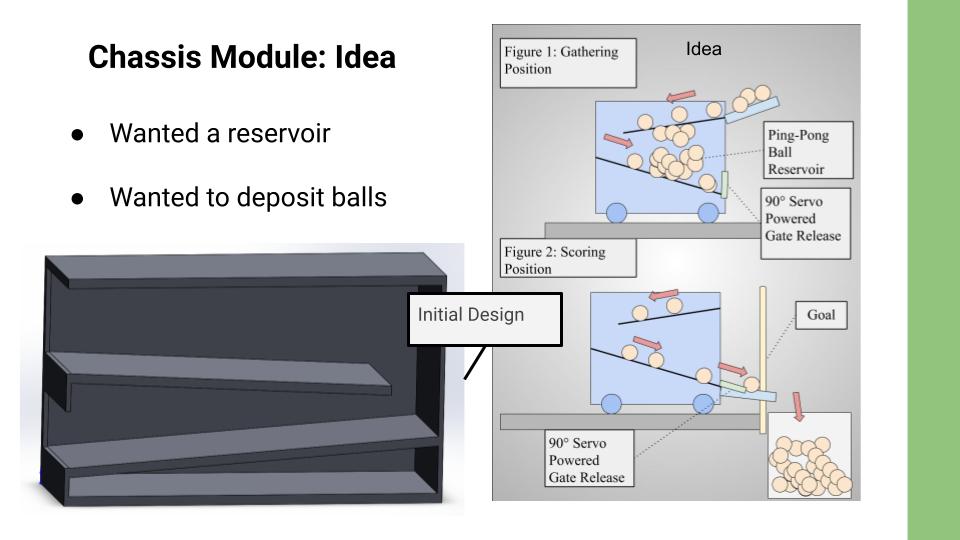
Our game tactic was to be able to hold as many ping pong balls as possible. Then we wouldn’t waste time going back and forth. We designed the very simple chassis to the right – It has a large reservoir for all the ping pong balls, with sloped slats that allow the balls to be easily deposited. Our servos only had to operate our scooping mechanism and the gate that would open to deposit the balls.


Pictured to the left are the prototype designs for the scoop (top) and our final scoop design (bottom). We had an elevator-type design that utilized the roundness of the ping pong balls. If the elevator was lowered onto the ping pong balls, they would pop through and be trapped in the container. However, the scoop itself would have to contain and deposit all the balls. This meant we wouldn’t be able to hold as many. We combined this design with the classic toy-truck type of scoop, so that there would be no issues with lowering our scoop onto balls, and it would also easily deposit them into the open-top chassis.
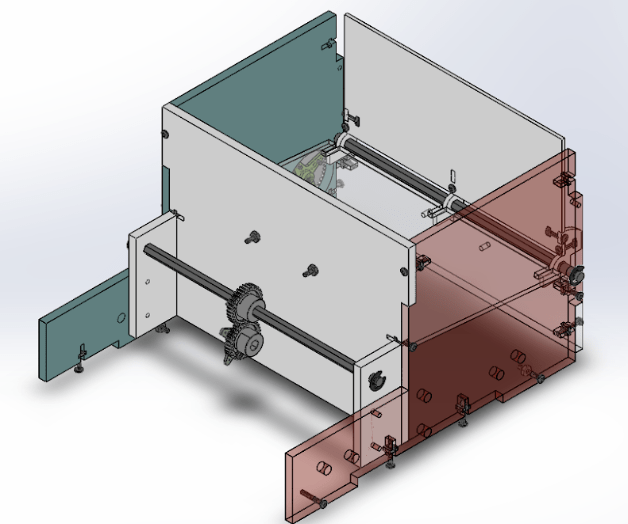
Final Design